Mecanum Wheeled Smart Robotic Arm Project

In this project, I brought to life a mecanum-wheeled mobile robot with a robotic arm that I had been planning for a long time. My goal was to build a system that is highly maneuverable, easy to control, safe, and capable of learning. As a result, I created a functional robotic platform suitable for education, R&D, and experimental robotics applications.
Control Architecture: STM32 + ESP32

The robot uses two microcontrollers: STM32 and ESP32. STM32 handles time-critical tasks such as motor and robotic arm control, while ESP32 is responsible for communication.
System status, active modes, and basic information are displayed in real time on an OLED screen, making it easy to monitor the robot during operation.
Free Movement with Mecanum Wheels

Thanks to the mecanum wheel structure, the robot can:
Move forward and backward
Slide left and right
Rotate around its own axis
This provides excellent maneuverability, especially in tight spaces.
The motion system uses stepper motors. To drive them, I used a Creality 3D printer control board, which is a reliable and ready-to-use solution. This made the motor control stable and straightforward.
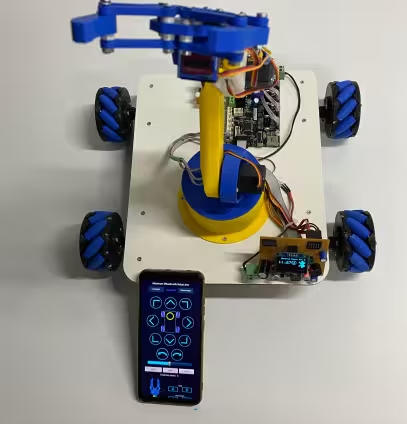
Bluetooth Control via Mobile Application
For wireless control, I used the Bluetooth capability of the ESP32. The mobile application was developed using MIT App Inventor.
Through the app, I can:
Control the robot’s direction
Rotate the body
Move the robotic arm up and down
Open and close the gripper
This allows easy and intuitive control directly from a smartphone.
Separate Power Lines for Stability
To improve stability, the power system is divided into two separate lines using two 3S batteries:
One battery powers the wheel and motion system
The other battery powers the robotic arm
This separation prevents sudden current draws from affecting the entire system.
Safety and Reset Features
If the Bluetooth connection is lost, the robot immediately detects it and automatically stops all movement. This is an important safety feature.
There is also a reset function that returns the robotic arm to its initial position, which is very useful for calibration and daily use.
Learning Mode
One of the most interesting features of the project is the Learning Mode. In this mode, the robot can:
Store multiple positions in memory
Replay them in sequence
Repeat the same movements consistently
This turns the system into a semi-autonomous robotic platform rather than just a remote-controlled robot.
Conclusion
This mecanum-wheeled robotic arm project was both educational and enjoyable to develop. It resulted in a safe, easy-to-control, and expandable robotic platform where hardware and software work together seamlessly.