Проект умного робота с меканум-колёсами и манипулятором

В этом проекте я реализовал мобильного робота с меканум-колёсами и роботизированной рукой, идею которого давно планировал. Целью было создать систему с высокой манёвренностью, простым управлением, безопасной работой и возможностью обучения. В результате получилась функциональная платформа для обучения, R&D и робототехнических экспериментов.
Архитектура управления: STM32 + ESP32

В роботе используются два микроконтроллера: STM32 и ESP32. STM32 отвечает за управление моторами и роботизированной рукой, а ESP32 используется для связи.
Состояние системы, режимы работы и основная информация отображаются на OLED-экране в реальном времени.
Свободное движение с меканум-колёсами

Благодаря меканум-колёсам робот может:
Двигаться вперёд и назад
Смещаться влево и вправо
Вращаться вокруг своей оси
Это обеспечивает отличную манёвренность, особенно в ограниченном пространстве.
Система движения построена на шаговых двигателях. Для их управления я использовал контроллерную плату от 3D-принтера Creality, что позволило получить стабильное и надёжное управление.
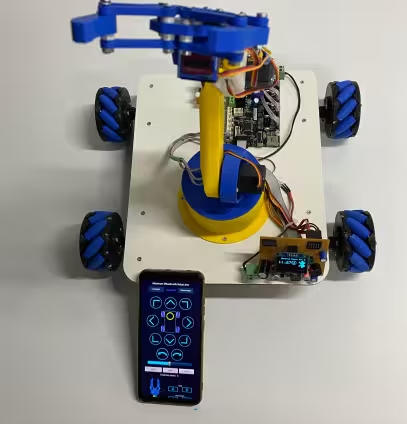
Управление по Bluetooth через мобильное приложение
Для беспроводного управления используется Bluetooth модуля ESP32. Мобильное приложение разработано с помощью MIT App Inventor.
Через приложение можно:
Управлять направлением движения робота
Поворачивать корпус
Поднимать и опускать роботизированную руку
Открывать и закрывать захват
Управление осуществляется удобно и интуитивно со смартфона.
Раздельное питание для стабильной работы
Для повышения стабильности система питается от двух аккумуляторов 3S:
Один аккумулятор — для движения и колёс
Второй — для роботизированной руки
Это предотвращает влияние резких скачков тока на всю систему.
Безопасность и функция сброса
При потере Bluetooth-соединения робот автоматически останавливает все движения. Также предусмотрена функция сброса, возвращающая руку в начальное положение, что удобно для калибровки и работы.
Режим обучения
Одной из ключевых особенностей является режим обучения. Робот может:
Запоминать несколько положений
Повторять их в заданной последовательности
Точно воспроизводить движения
Это превращает систему в полуавтономного робота.
Заключение
Этот проект робота с меканум-колёсами стал для меня полезным и интересным опытом. В результате получилась безопасная, удобная в управлении и масштабируемая робототехническая платформа.