Mecanum Tekerlekli Akıllı Robot Kol Projesi

Bu projede, uzun zamandır aklımda olan mecanum tekerlekli ve robot kollu bir mobil robot fikrini hayata geçirdim. Amacım; hem hareket kabiliyeti yüksek, hem kontrolü kolay, hem de güvenli ve öğrenebilen bir sistem ortaya koymaktı. Sonuç olarak; eğitim, Ar-Ge ve farklı robotik denemeler için kullanılabilecek oldukça işlevsel bir robot ortaya çıktı.
Kontrol Yapısı: STM32 + ESP32

Robotta iki farklı mikrodenetleyici kullandım: STM32 ve ESP32. STM32, motorlar ve robot kolu gibi zamanlama ve hassasiyet isteyen işleri yönetiyor. ESP32 ise haberleşme tarafında görev alıyor.
Sistemin durumu, aktif modlar ve bazı temel bilgiler OLED ekran üzerinden anlık olarak görülebiliyor. Bu da robotun ne yaptığını her an takip etmeyi kolaylaştırıyor.
Mecanum Tekerlekler ile Serbest Hareket

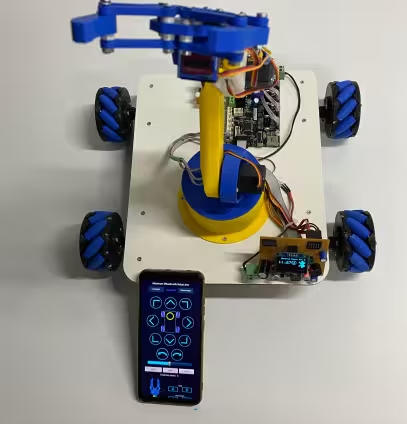
Robotun en dikkat çekici kısmı, mecanum tekerlekli yapısı. Bu sayede robot:
İleri ve geri hareket edebiliyor
Sağa ve sola kayabiliyor
Olduğu yerde kendi etrafında dönebiliyor
Bu yapı özellikle dar alanlarda ve hassas manevralarda büyük avantaj sağlıyor.
Hareket sistemi step motorlar ile çalışıyor. Step motorları sürmek için ise hazır ve güvenilir bir çözüm olan Creality 3D yazıcı kontrol kartı kullandım. Böylece motor sürme tarafı stabil, sorunsuz ve pratik bir şekilde çözülmüş oldu.
Bluetooth ve Mobil Uygulama Kontrolü
Kablosuz kontrol için ESP32’nin Bluetooth özelliğini kullandım. Mobil uygulamayı ise MIT App Inventor ile geliştirdim.
Uygulama üzerinden:
Robotun yönünü kontrol edebiliyorum
Gövdeyi döndürebiliyorum
Robot kolunu yukarı ve aşağı hareket ettirebiliyorum
Tutucuyu (gripper) açıp kapatabiliyorum
Telefon üzerinden yapılan bu kontrol, sistemi hem kullanımı kolay hem de oldukça sezgisel hâle getiriyor.
Ayrı Güç Hatları ile Daha Kararlı Çalışma
Robotun daha stabil çalışması için güç tarafını ikiye ayırdım. Sistem iki adet 3S batarya ile besleniyor:
Bir batarya sadece tekerlek ve hareket sistemine
Diğer batarya robot koluna güç sağlıyor
Bu sayede ani akım çekimleri diğer sistemi etkilemiyor ve genel olarak daha güvenli bir çalışma elde ediliyor.
Güvenlik ve Reset Özellikleri
Güvenlik konusu projede özellikle önem verdiğim noktalardan biri oldu. Bluetooth bağlantısı koptuğunda robot bunu hemen algılıyor ve tüm hareketleri otomatik olarak durduruyor. Bu da olası kazaların önüne geçiyor.
Ayrıca robot kolunu başlangıç pozisyonuna döndüren bir reset (sıfırlama) fonksiyonu da bulunuyor. Bu özellik, kullanım ve kalibrasyon sırasında büyük kolaylık sağlıyor.
Öğrenme Modu (Learning Mode)
Projenin en keyifli ve gelişmiş özelliklerinden biri Öğrenme Modu oldu. Bu mod sayesinde robot:
Birden fazla pozisyonu hafızasına kaydedebiliyor
Bu pozisyonları sırayla tekrar edebiliyor
Aynı hareketleri her seferinde tutarlı şekilde yapabiliyor
Bu sayede sistem, sadece uzaktan kontrol edilen bir robot olmaktan çıkıp yarı otonom bir yapıya kavuşuyor.
Sonuç
Mecanum tekerlekli robot kolu projesi, benim için hem öğretici hem de geliştirirken keyif aldığım bir çalışma oldu. Donanım ve yazılımın uyum içinde çalıştığı, güvenli, kontrolü kolay ve geliştirilmeye açık bir robotik platform ortaya çıktı.